")
Manipulator CW
- Szczegóły
- Kategoria: Różne
- Opublikowano: czwartek, 06 luty 2020 21:30
- SQ1GU
- Odsłony: 7195
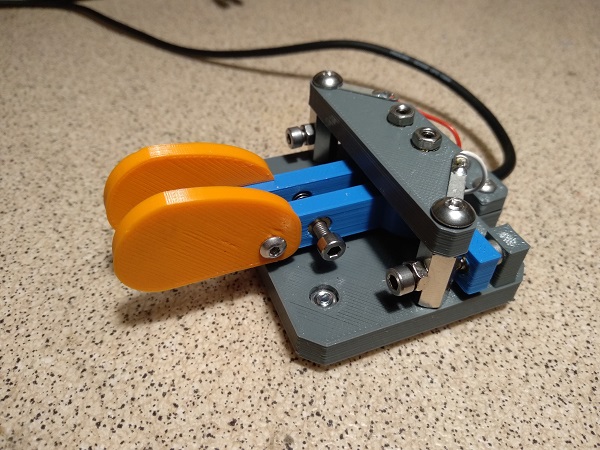
3D manipulator CW
W internecie można znaleźć wiele projektów wykonania manipulatora CW.
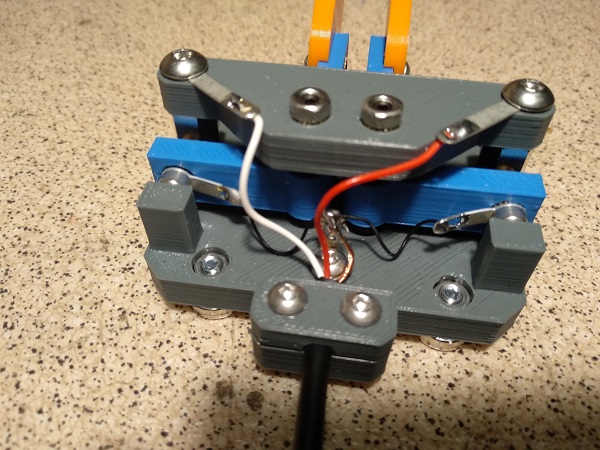
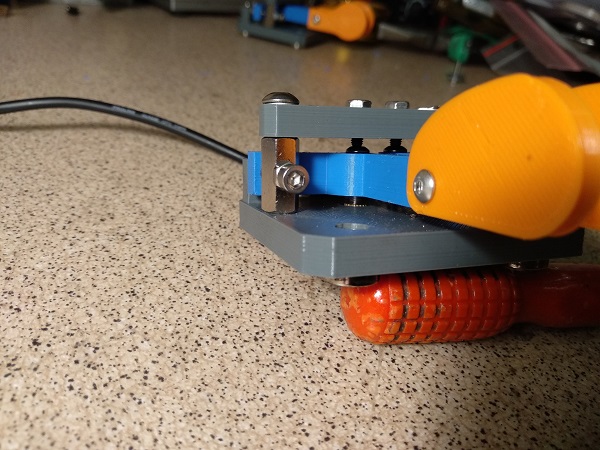
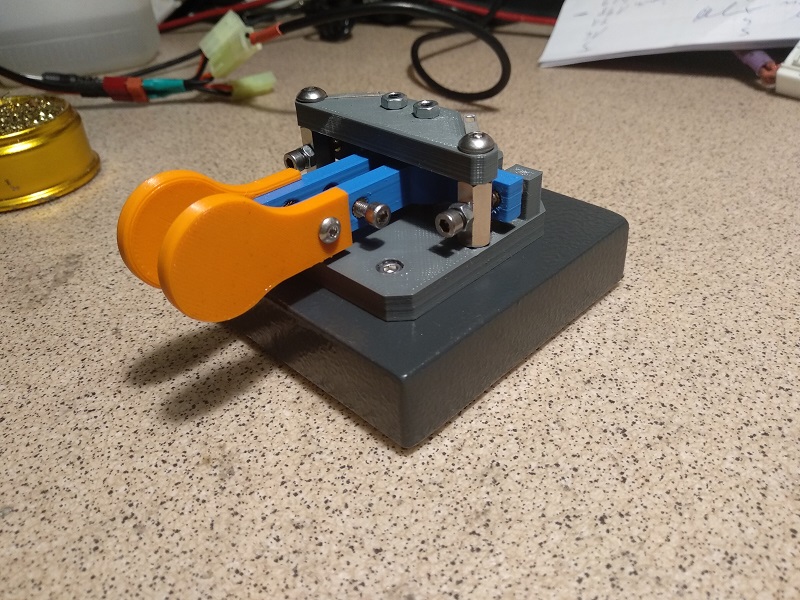
To jest moja wersja manipulatora. Elementy plastikowe zostały narysowane w programie 123D. Wydruki są wykonane z materiału PLA z ustawionym wypełnieniem 60% i wysokością warstwy 0.2mm. W otwory powciskane są na gorąco(lutownicą) tulejki gwintowane M3. Dźwignie manipulatora są zamocowane na zasadzie docisku jednej sruby do drugiej. W łepek sruby kulistej imbusowej M3 wkręconej w dźwignię, wchodzi od góry kolejna śruba, która dźwignię dościska i trzyma na miejscu. W manipulatorze jest dotępna regulacja skoku dźwigni, regulacja siły nacisku i regulacja (kasowanie) luzów dźwigni. Do manipulatora można przykręcic magnesy neodymowe , albo bezposrednio przykęcić do solidnej podstawy.
Pliki STL do wydruku 3D <<<<<<
Film na Youtube - instrukcja składania <<<<<<
Lista śrubek:
m3x16 łepek kulisty 2szt mocowanie dźwigni
m3x10 łepek kulisty 1szt regulacja siły
m3x6 łepek walcowy 2szt styki dzwigni
m3x12 łepek walcowy 2szt styki w tuleji M4
m3x8 łepek walcowy 2szt uchwyt kabla
m3x8 stożkowe 4szt do magnesów
m3x6 łepek kulisty 2szt do łapek
m3x10 bez łba 2szt docisk dziwigni
m4x10 łepek kulisty 2szt
konektor oczkowy m4 2szt
konektor oczkowy m3 3szt
nakrętka m3 5szt
nitonakrętka(wkładka gwintowana) m3 5x4mm 12szt
tulejka dystansowa M4x14mm (gwint wew.zew) 2szt
spręzynka naciskowa fi 3.5mm x 10mm